 平台热线
平台热线



1.那么为什么要用PROFINET通讯方式呢?
因为是机器人在外部自动运行时往往需要PLC对其自身状态进行数据监控,程序选择,故障诊断。这些信号的交互是必不可少的。采用PROFINET通讯协议,取消工业机器人和上级控制器的传输限制,使传输信号更加稳定。
PROFINET是基于以太网实现的工业通讯系统,具备集成分布式I/O的PROFINET IO和分布式自动化中创建模块化设备系统的PROFINET CBA。其实这个定义个人觉得很啰嗦,其实就是实现了工业现场总线系统之间的无缝集成。
PROFINET的通讯方式分为三种:①TCP/IP标准通信,其响应时间为大约100ms②实时通讯,其响应时间大约5~10ms③等时实时通讯,其响应时间小于1ms,抖动误差小于1μs。由此可以看得出来其实现了开放式的和分配式的全面通讯能力。
4.PROFINETCBA将组件的创建和组件的应用进行分离。
如图下所示。在该系统中,采用西门子S7-300PLC作为主站,KRC4控制柜作为从站用来控制机械臂的运动和状态。KRC4控制柜通过KLI接口与西门子交换机(SCALANCE)相连接,系统总线采用RJ45插头的双绞线。系统工作时,上级控制器PLC通过外部自动运行接口向机器人控制系统发送机器人进程的相关信息:运行许可,故障确认,程序启动等。机器人控制系统向上级控制器PLC发送运行状态与故障状态的相关信息。PC作为组态和监控的控制器对KRC4控制柜的PROFINET选项进行配置,并对PLC进行项目组态和运行状态的监控。
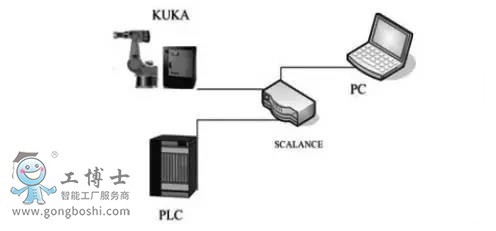
KUKA机器人采用专用的网卡DualNIC,其中包含两个1000Mbit/s的具有局域网配适器的网卡,相当于两个VLANs。端口与KUKA控制总线相连接,第二个接口则与KLI客户接口相连接。系统的总线采用RJ45插头的双绞线,具有较高的传输速率。其外层由铝箔包裹,可减小辐射和干扰。
KRC4控 制柜突破了KRC2控制柜的局限性,不再需要插入CP1616 PROFINET网卡对PROFINET进行配置工作,通过控制器上提供并使用的KLI(DualNIC)端口进行连接并安装PROFINET软件堆栈模拟PROFINET卡的功能,提高了软件的灵活性,减少了硬件的配置,使通讯系统更加稳定。
用workvisual软件对KRC4控制柜进行PROFINET项目配置,并通过KSI(库卡服务接口)与PC机建立连接,在workvisual软件中导入需要进行PROFINET配置的机器人项目。KSI(库卡服务接口)使PC机通过电缆可以简单的插入KSI(库卡服务接口),KSI(库卡服务接口)可充当DHCP服务器,使PC机和KRC4控制柜通过DHCP自动建立连接。
在workvisual读入KRC4项目后,需要对原有机器人总线结构进行扩展,扩展前将项目的控制器进行激活,在总线结构中添加PROFINET的DTM编目。在PROFINET设置中,因为KRC4控制柜作为PROFINET总线的从站,所以在communication set-tings选项卡中将PROFINET设备栈进行激活,设备名称必须与PLC中的设置相同。
总线循环时间设置一般为8ms,总线超时时间设置为20000ms,这样做可以避免在PROFINET数据传输过程中出现时间冲突,提高稳定性,并且当KRC4控制柜无法在20000ms的时间内与PLC建立连接则会产生错误信息,如果随后建立了连接,错误信息会变为确认信息,须对此项进行确认后继续运行。
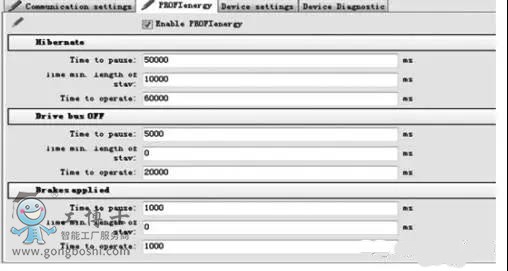
图为workvisiul PROFINET配置选项卡

plc与krc4外部接口信号交互图
了解更多库卡机器人资料信息可咨询:库卡机器人服务商